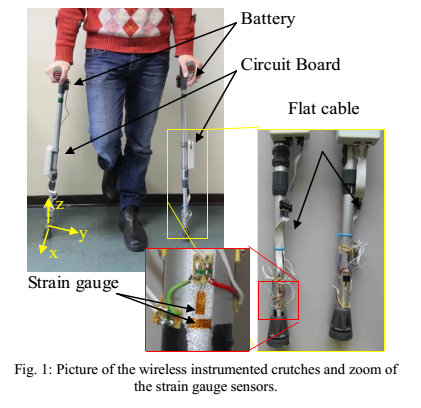
This paper describes synthetically the design, development and characterization of two wireless instrumented crutches for monitoring lower-limb rehabilitation activities. These sensorized crutches allow monitoring axial and shear forces and tilt angles in real time. Each crutch is composed of three strain-gauge bridges measuring axial and shear forces, a conditioning and transmission circuit, a tri-axial accelerometer and a battery power management circuit. The data are transmitted wirelessly via Bluetooth to a remote computer, no further readout unit is necessary.
The instrumented crutches have been tested and characterized using an ad-hoc experimental setup and they have been used for the first tests on one subject. This post shows, in a concise manner, the description of the system and the first experimental results on one crutch obtained in laboratory. © 2014 The Authors. Published by Elsevier Ltd.
In the literature, a few prototypes that allow you to assist in the rehabilitation activities are reported and some functions that therapists consider important are not implemented, such as the measurement of the shear forces due to the unbalance of the patient. Collaborations with therapists have allowed us to identify the main features of the sensors.
The axial and shear forces are measured by twelve strain gauge sensors integrated into each crutch and connected in bridge configurations, a dedicated low-power electronics allows to filter and amplify the signals. Each sensorized crutch is powered by one 9 V battery (1.2 Ah) permitting up to 24h monitoring. The preliminary results obtained testing each wireless instrumented crutch show a good accuracy of the sensors.
doi:10.1016/j.proeng.2014.11.745
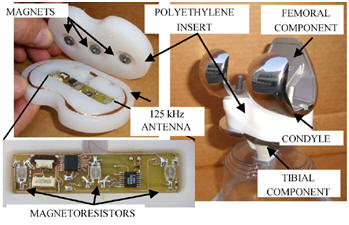
INSTRUMENTED KNEE PROSTHESIS
In vivo monitoring of human knee implants after total arthroplasty increases information concerning articular motion and loading conditions. The autonomous sensor proposed carries out force measurements in a protected environment and wirelessly transmits data directly from the inside of the implant to an external readout unit. The autonomous sensor is fully contained in the polyethylene insert. Batteries are completely eliminated; the system gathers energy from an externally applied magnetic field using a miniature coil inside the implant. The data generated from this device will provide data for new designs, techniques and implementations. The forces transmitted across the knee joint during normal human activities such as walking, running or climbing can be directly measured. Furthermore, the device can be used to improve design, refine surgical instrumentation, guide post-operative physical therapy and detect human activities that can overload the implant.

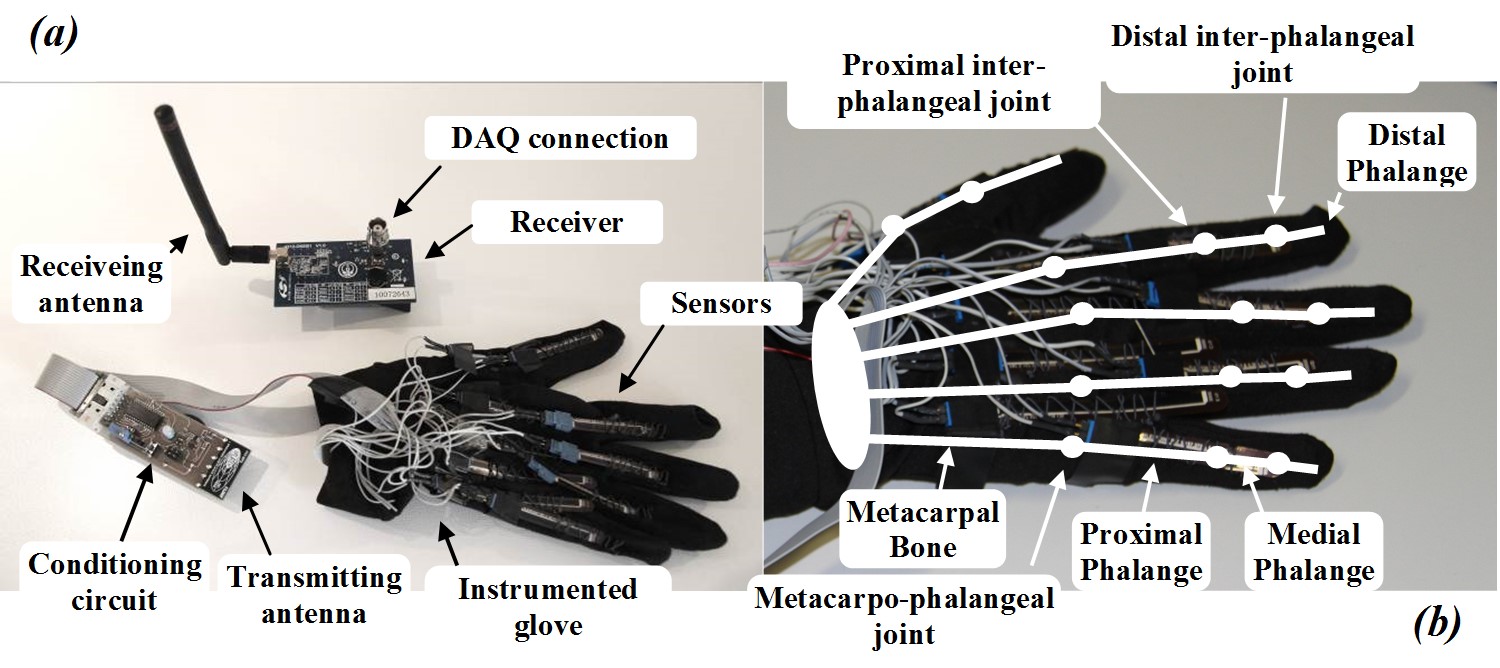
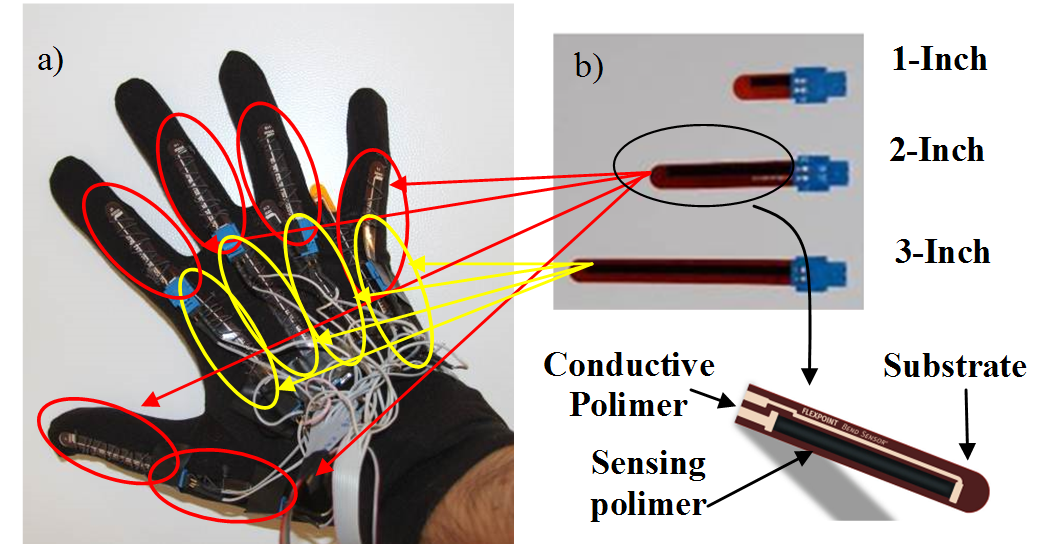
Sensorized Glove for Measuring Hand Finger Flexion for Rehabilitation Purposes
Over the last 30 years, scientific and technological progress has boosted the development of medical devices that can assist patients and support medical staff. With regard to the rehabilitation of patients who have suffered from traumas, robotic systems can be an aid for rapid patient recovery. This paper focuses on studying and implementing a system for measuring the finger position of one hand with the aim of giving feedback to the rehabilitation system. It consists of a glove where sensors are mounted suitably configured and connected to an electronic conditioning and acquisition unit. The information regarding the position is then sent to a remote system. The objective of this paper is to provide a sensorized glove for monitoring the rehabilitation activities of the hand. The glove can have several other applications such as: 1) the recognition of sign language; 2) the diagnostic measurement of the finger movement at a distance; and 3) the interaction with virtual reality.